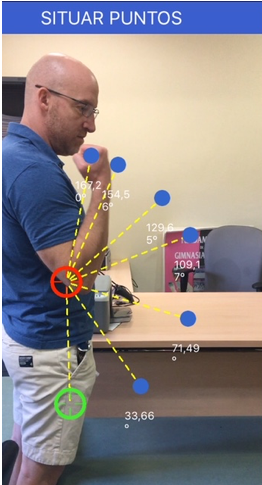
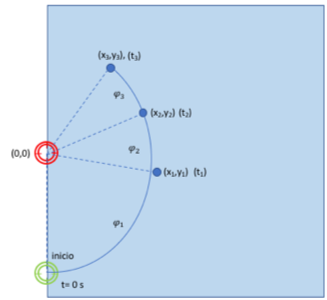
De esta forma el usuario marca puntos de interés en la trayectoria del movimiento y Kinematic LabMov obtiene valores de velocidad angular y aceleración para cada intervalo. Los valores de aceleración permiten la obtención de variables dinámicas, como son el torque o momento de la fuerza (M) y la obtención del valor de potencia. Para las estimaciones de torque o momento del movimiento es necesario recurrir a la 2ª Ley de Newton para rotación que se expresa como:
Donde I representa el momento de inercia del sistema (que para una masa puntual se expresa como I = m⋅r2) y describe la forma en la que la distribución de la masa del mismo influye en su tendencia a girar, y α es la aceleración angular (que se obtuvo anteriormente a partir de la tasa de cambio de ω(t). El valor I de puede calcularse considerando que el movimiento angular articular presenta un momento de inercia correspondiente al de una masa puntual sujeta al extremo de una varilla que rota sobre su otro extremo, pudiendo expresarse como:
En un movimiento corporal los momentos de inercia (M) que producen rotación son tres y de manera general el momento resultante se expresa como una suma de todos ellos:
Momento que genera la carga externa ⟹ M1 = -m1 ⋅ g ⋅ r ⋅ sen
Siendo m1 la carga externa; r la longitud del segmento que se desplaza (introducida por el usuario de la app) y el valor del ángulo en el instante del movimiento marcado por el usuario
Siendo m2 la masa relativa del segmento corporal que se desplaza; r/2 el punto aproximado en el que se localiza el centro de masa del segmento que se desplaza y el valor del ángulo en el instante del movimiento marcado por el usuario
Siendo
F la fuerza generada por la musculatura agonista;
r/2 es una aproximación de la inserción muscular relativa a la longitud del segmento que se desplaza y
sen 30 = 1/2 el valor aproximado del ángulo con el que el tendón ejerce la fuerza de tracción sobre el segmento corporal. Hasta este punto disponemos de los siguientes datos conocidos:
- m1 es la carga externa que se añade al movimiento y se selecciona en el panel de opciones en caso de realizar el movimiento con una mancuerna u otro medio de carga (en kg).
- m2 es la masa del segmento o segmentos corporales que se desplazan y se obtiene mediante datos obtenidos de tablas que proporcionan el peso relativo de los diferentes segmentos en relación al peso corporal del sujeto. La app obtiene este valor a partir del peso del sujeto que se aporta como dato por el operador.
- r y fracciones de son la medida del segmento que se moviliza y se obtiene a partir de la estatura del sujeto. Las fracciones de corresponden a localizaciones de centros de masas o puntos de tracción relativas a la longitud del segmento.
- ángulo es el valor angular de la posición del segmento en cada instante que el usuario marca como punto de referencia del movimiento.
- El momento de inercia I del sistema (m1 + 1/3 ⋅ m2)⋅r2
- El valor de la aceleración angular (α) que se obtienen considerando la tasa de cambio de ω(t) ⟹ α = Δω/Δt
El único valor no conocido es el valor del momento de la fuerza muscular F que puede obtenerse despejando de la siguiente ecuación:
Simplificando los términos y despejando nuestra incógnita, F nos queda:
F = (6m1 + 3m2) ⋅ g ⋅ sen + (6m1 + 2m2) ⋅ r ⋅ α
La ecuación anterior aproxima los valores de fuerza muscular a partir de los datos proporcionados y obtenidos a partir de los cálculos anteriores. Obsérvese la coherencia entre las dependencias del valor de la fuerza muscular, con cada una de las masas implicadas (especialmente la carga externa, m1), la longitud del segmento (r), el ángulo (), el valor de la aceleración angular (α) y la influencia de g. De esta forma, aportando el valor de (), cada vez que se marca un punto en la app y mediante la ecuación anterior se aproxima el valor de la fuerza muscular F, en ese punto. Como cada valor de (), se registra junto a un valor de velocidad angular (ω) , podemos obtener el valor de potencia P en ese punto considerando que la potencia , puede expresarse como el producto de la fuerza por la velocidad, o en este caso, del momento de la fuerza muscular M por la velocidad angular (ω) :